


服务项目 |
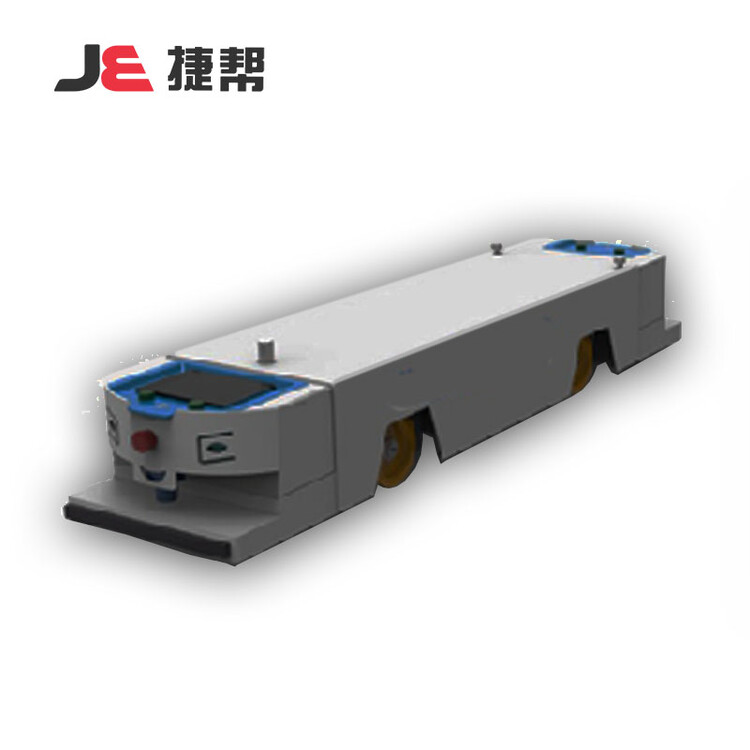
智能搬运车AGV |
面向地区 |
全国 |
电磁感应引导。利用低频引导电缆形成的电磁场及电磁传感装置引导无人搬运车的运行。激光引导。利用激光扫描器识别设置在其活动范围内的若干个定们标志来确定其坐标位置,从而引导AGV运行。
因此AGV自动导引小车行走过程中,需要不断地根据输入的位置偏差信号调整电机转速,对系统进行实时控制。
车体
包括底盘、车架、壳体和控制室和相应的机械电气结构如减速箱、电机、车轮等所组成,是AGV的基础部分。具有电动车辆的结构特征和无人驾驶自动作业的特殊要求。车架常用钢构件焊接而成,重心越低越有利于抗倾翻。板上常安置移载装置、电控系统、按键、显示屏等。